La pandemia global y emergencia sanitaria en Perú cambiaron nuestro estilo de vida y, de la noche a la mañana, muchas personas se convirtieron en sedentarias, lo cual empezó a afectar no solo la salud física sino también la mental. Ante reportes sobre la posibilidad del incremento de enfermedades cardiacas, estrés, cáncer, diabetes, obesidad, osteoporosis y osteoartritis, en personas que se mantienen sedentarias, sin mencionar depresión y ansiedad; encontramos que la pandemia y la cuarentena representan más problemas de salud que sólo contagios.
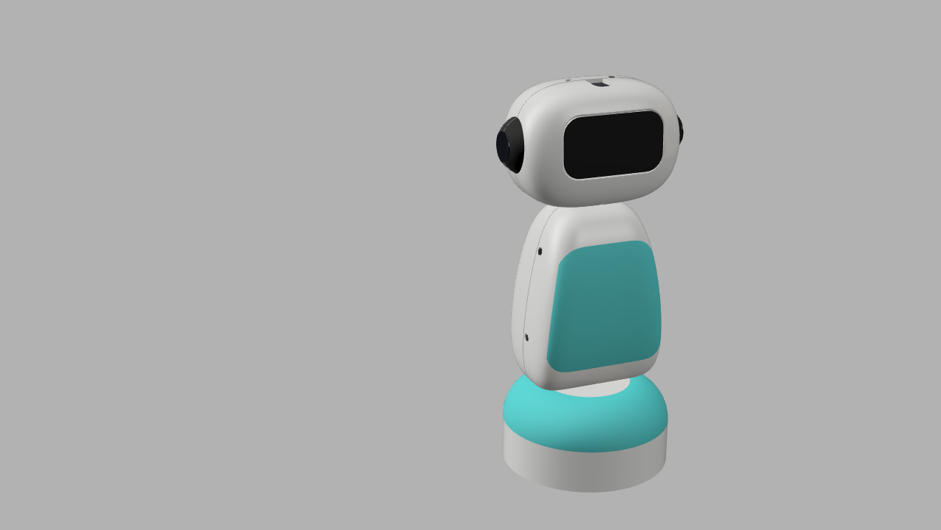
Entonces, con el objetivo de reducir el sedentarismo y sus consecuencias negativas en personas que ahora trabajan y estudian desde casa, Andrés Acho y su equipo desarrollaron InteraBOT, un compañero digital interactivo que alerta a sus usuarios acerca del tiempo estáticos o sentados, animándolos a hacer una pausa para realizar diez minutos de actividad física, registrando sus rutinas diarias y mejorando su calidad de vida.

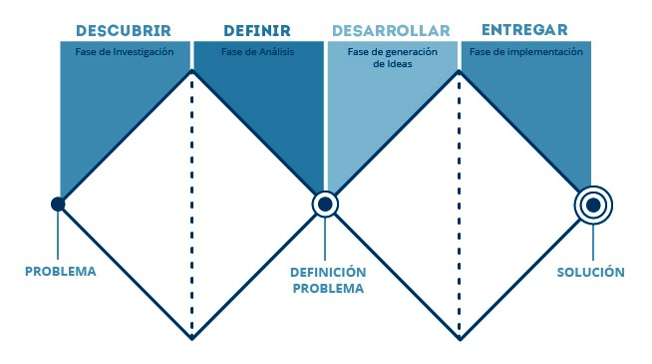
Para estructurar el proyecto se utilizó la metodología de Doble Diamante, muy utilizada en las especialidades de Diseño Industrial donde se descubre cuál es el problema que trae consigo la cuarentena y, por ende, el sedentarismo. Luego, en la fase de investigación se logró identificar diferentes maneras en cómo luchar con el problema: con interacción, actividad física y la interrupción del sedentarismo. La tercera fase de desarrollo incluyó una lluvia de ideas para poder explorar las opciones que se tenían para derrotar los problemas específicos del sedentarismo. Finalmente, en la etapa de entrega, y a través del uso de tecnología e innovación, se mezclaron todas las soluciones en un robot de acompañamiento.
Luego empezó la etapa de la implementación de todas estas ideas, realizándose el prototipo de la carcasa del robot elaborada con impresión 3D. Luego se desarrolló la interfaz del aplicativo donde se muestran indicadores clave de las actividades físicas realizadas.
El primer reto en esta etapa fue el tamaño de las piezas internas del robot, las cuales eran más grandes que lo planeado, siendo la principal dificultad el sensor del ritmo cardiaco que no monitorea correctamente. Para poder superar estas dificultades primero se tuvo que adecuar las piezas electrónicas al cuerpo del robot aumentando su tamaño. En cuanto a la medición del ritmo cardíaco, todavía se continúa la búsqueda de una pieza que haga una correcta lectura.
Andrés recuerda una anécdota graciosa al momento de soldar el switch que es el botón para encender y apagar el robot: “Mantuve mucho tiempo caliente el switch al soldar con los cables causando que se malogre. Fue ahí cuando me di cuenta que este proyecto tiene mucho potencial pues estuve en la misma posición por mucho tiempo, haciendo que pierda concentración y malogre el prototipo”.
Este proyecto mejorará la vida de las personas al tener un dispositivo interactivo para evitar el sedentarismo. Sin embargo para terminar el primer prototipo, Andrés necesita de un desarrollador de software que pueda realizar el aplicativo y relacionarlo con el robot. “Además, se necesita un mecatrónico que nos pueda apoyar en el tema de mantenimiento y pruebas de errores que pueda causar el robot al fabricarlo y máquinas inyectoras para la fabricación de piezas”, mencionó a la Jefatura de Innovación de Tecsup.
Si deseas conocer más acerca del proyecto InteraBOT, conversar con Andrés y unirte a esta iniciativa, no dejes de escribirnos a innovacion@tecsup.edu.pe o contactarte con Andrés a andres.acho@tecsup.edu.pe.



Hola, genial trabajo. Soy alumno de la UNI y estoy en sexto ciclo, junto con mi compañero he realizado un mini proyecto similar para un curso, pero más que todo como un dispositivo de bajo costo usando un sensor PIR principalmente. Siempre he estado a favor de la innovación así que podría participar de forma voluntaria en el desarrollo del proyecto. Mi correo es: anthony.porras.u@uni.pe y mi wsp 933227641
Luego empezó la etapa de la implementación de todas estas ideas, realizándose el prototipo de la carcasa del robot elaborada con impresión 3D.
https://spadesonline.io/
Esos son diseños y creaciones muy impresionantes. https://fall-guys.co